
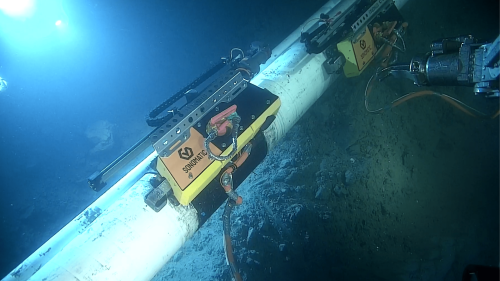
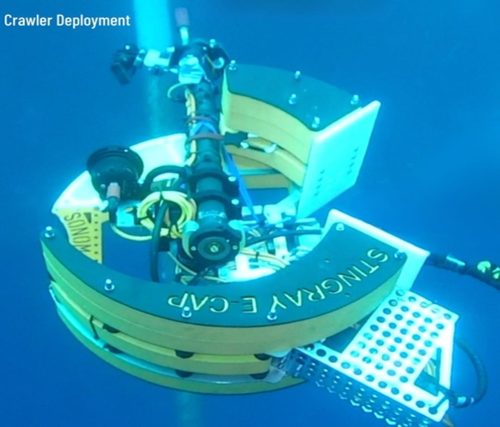
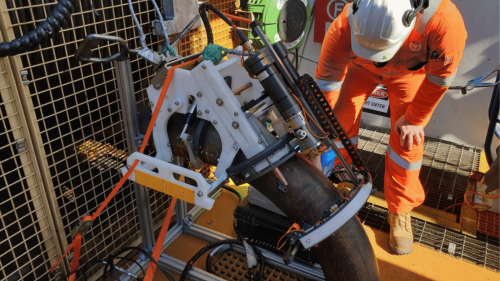
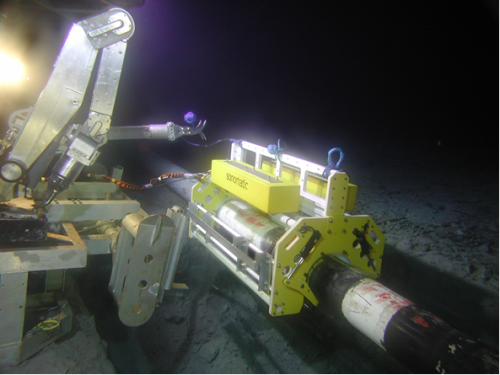
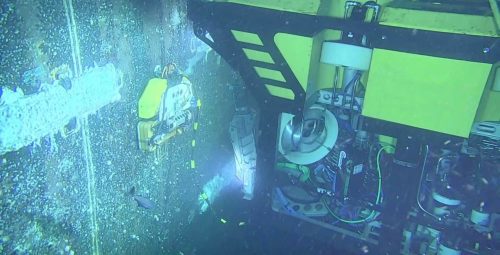
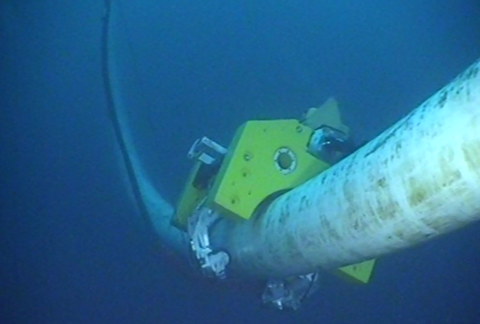

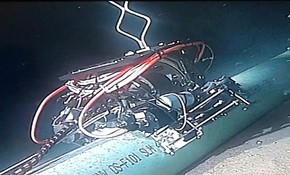
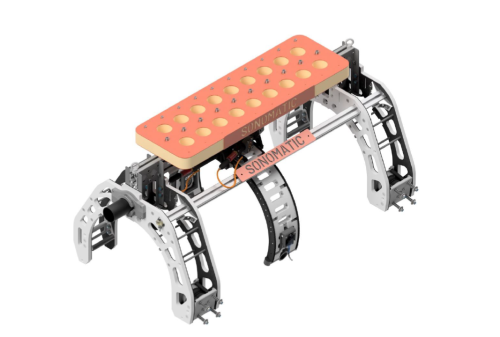
A ferramenta Mini-ROVIT foi desenvolvida para oferecer uma solução econômica de inspeção da espessura da parede de dutos submarinos. Projetada para ser operada por pequenos ROVs, permite o mapeamento da corrosão em emendas de campo sem a necessidade de ROVs de grande porte ou navios de intervenção dedicados (DSVs), reduzindo significativamente os custos.
Entre as principais características estão o design integrado ao ROV, limpeza circunferencial da superfície e varredura de alta precisão para dutos com diâmetros entre 6 e 20 polegadas. Seu tamanho compacto possibilita uma rápida mobilização a partir de embarcações disponíveis, minimizando despesas operacionais. Essa inovação já resultou em uma economia de até 70%, ao mesmo tempo em que aumenta a eficiência na avaliação da integridade de dutos submarinos.